
He comprado un Robot Romo por Romotive. Lamentablemente estoy teniendo algunos problemas técnicos(no funciona en absoluto) con ella así que me decidí a explorar el PCB un poco y ver lo que sus hechos.
Comprendo que la mayoría de los PCB y rastreado las patillas de conexión de la mayoría de los Chip Atmel pero nunca he tenido ninguna experiencia con los motores de antes. Se utiliza este motor.

Haga clic aquí para un 300mm@8mp 'Hubble', cerca de la PCB expuestos en 15seconds, 100ISO 24f (5.5 mb)
Cuando enciendo el bot de allí es de 3.2 V en los motores [probado el motor - & + a GND)], pero las pruebas del motor + y - y viceversa rendimientos 0Volts. Así que tomando el H-Brdige en cuenta ahora que parece normal.
La emisión de cualquiera de los comandos de los motores no girar..(cuando me conecte un motor directo a la batería gira felizmente lejos, con un bonito par.. ) Cuando me emitir comandos de la tensión es la misma a través de los motores(al parecer, las señales no son lo suficientemente fuertes o posiblemente el protocolo cambiado) mientras está conectado a la PCB.. Pero no puedo determinar si el MCU es responder a todos los comandos.
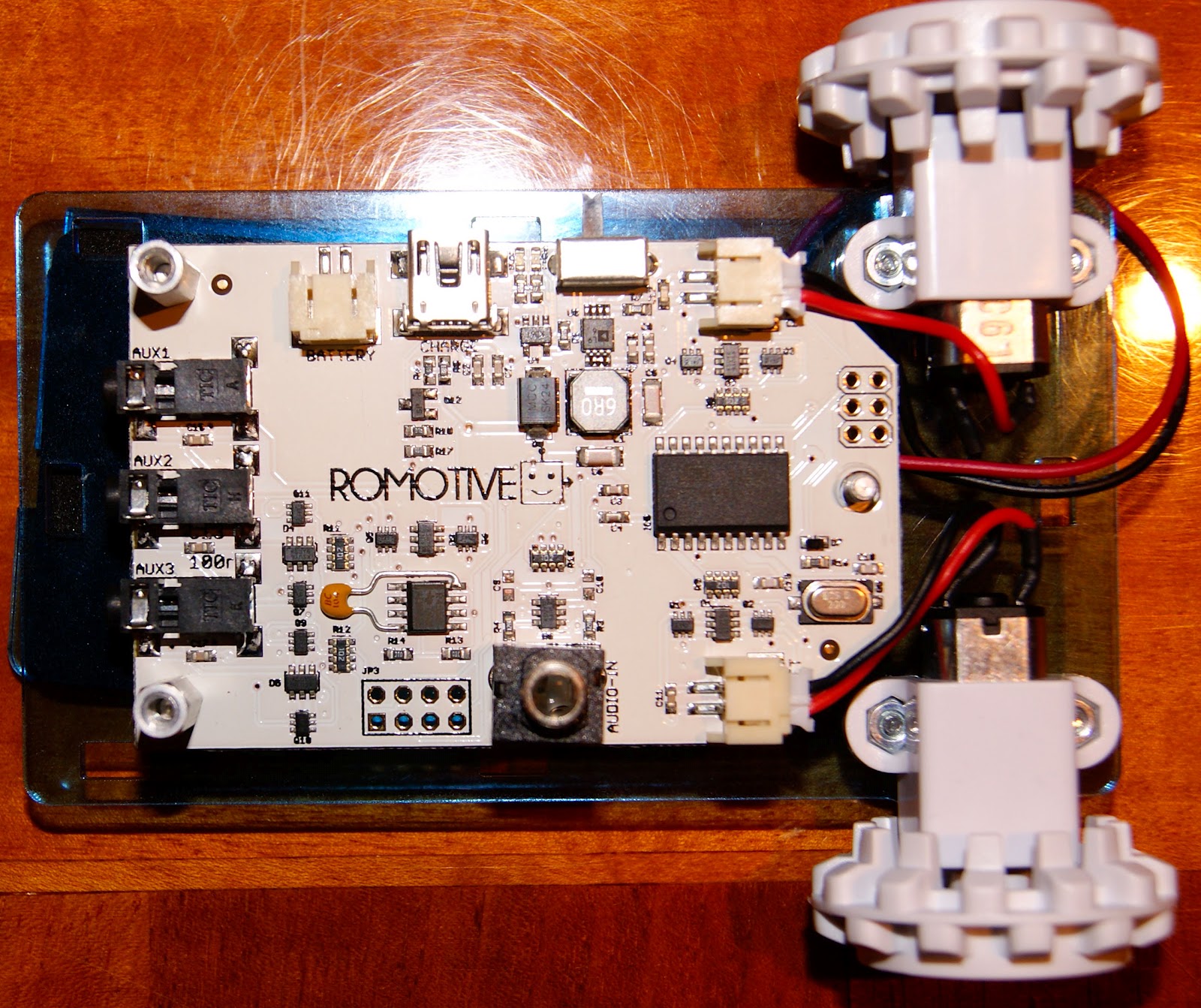
Debo asumir sus controlado por PWM de alguna manera? Estoy en lo cierto? Más probable es que no. Yo no se traza que los pines de los motores están conectados en el Atmel. Después de tomar una hora para llegar a la perfecta fotografía macro me las arreglé para descifrar algunos de los temas sobre los nombres en la IC.
- A la derecha del motor está conectado a los pines 3 y 4
- A la izquierda el motor no esta en la foto a los pines 1,2
- En la imagen se indica que las pistas están conectados
- ? en la imagen se indica no tengo idea de donde esta pista va.. el lado izquierdo no tiene esta
- Negro "-" en la imagen se indica GND

- D2 como simbolizada debe ser diodos. (KSU)(Y6)[Estos valores se imprime dos veces, al derecho y al revés, lo que indica un combinado de diodo?] Creo que es un
0.3W zener 18V±5% - Q4,Q3 Indica Transistores pero la investigación me lleva a dos Diodos 1N4148?
- R6 indica una resistencia con un valor de 102, lo que es de 10k
- Podría esta toda la config ser el equivalente de este tutorial?
¿Alguien puede explicarme lo que el bloque rojo he marcado (exactamente el mismo para el otro lado), lo que los SMD son propensos a ser.. he intentado buscar por las marcas en ellos, pero no aparece nada para cualquier hoja de datos.(EDICIÓN, porque SMD marcas son decodificados differntly y muchos manyfactuers tienen los mismos códigos para las distintas partes, por lo que su tiempo de juego de deducción y el sentido comunes aquí.. con la ayuda de impresionante chicos en StackElectronics!)
ATT: JustJeff
Aquí está lo que parece ser un poco más claro el diseño de las pistas y se puede notar el grosor de las pistas utilizadas por el motor de pines y la delgada pistas para las señales. Así que, como usted sugiere, tiene que ser una fuente de energía para esta corriente en algún lugar.. estoy mirando esta foto y realmente no averiguar de donde. Obiosly que tiene que ser cambiado usando los pares de transistores que @RussellMcMahon identificado(q1,q2) y el zenners/diodos(supongo).

Romotive
Romotive es un proyecto de código abierto.. Pero...
Incómodamente no hay código Fuente disponible para el Atmel, sólo SDK. Mi robot está muerto. con sin respuesta alguna respuesta de Romo equipo (sé que debe estar muy ocupado debido a las cargas de los otros pueblos también no funciona).. Así que bien podría hacer mi propio firmware si yo sabía cómo conducir los motores. O al menos probar con mi Arduino? O algo así..

Romotive Hackeado Usted-Tubo De Enlace
--






{kind=link}
{kind=link}