Consideremos el grupo de permutaciones de 3 objetos en una línea generado por dos 'rotaciones' r,sr,s, donde rr intercambia los dos primeros en la línea y ss intercambia los dos últimos en la línea.
r(1,2,3)=(2,1,3)r(1,2,3)=(2,1,3).
s(1,2,3)=(1,3,2)s(1,2,3)=(1,3,2).
Nota que rs≠srrs≠sr ya que:
rs(1,2,3)=(3,1,2)rs(1,2,3)=(3,1,2).
sr(1,2,3)=(2,3,1)sr(1,2,3)=(2,3,1).
Ahora puedes preguntarte, ¿qué tiene que ver esto con las 'rotaciones reales' en el espacio? De hecho, este es precisamente el mismo fenómeno que el ejemplo de los dados dado por Arthur. ¡Los 3 objetos son los 3 ejes ortogonales (no dirigidos) que son perpendiculares a las caras, y las dos rotaciones mencionadas intercambian de hecho diferentes pares de ejes!








{kind=link}
4 votos
Solo puedo adivinar lo que significa tu segunda oración.
27 votos
Dos rotaciones en el plano son efectivamente conmutativas. Sin embargo, dos rotaciones en el espacio tridimensional no son conmutativas.
0 votos
¿En el espacio 3D por qué no son conmutativos?
40 votos
Podría ser útil coger un dado e intentar girarlo en diferentes direcciones. A mí me ayudó mucho.
0 votos
Genial.. Lo intenté ahora y también me ayudó.. Gracias
31 votos
Siempre encuentro extrañas este tipo de preguntas "¿por qué los XYZXYZ no tienen la propiedad PQRPQR?" ¿Por qué serían conmutativos los giros? Ab initio, no hay razón para asumir que algún tipo de mapeo sea conmutativo. Ciertos mapeos, como las rotaciones en 2D, resulta que tienen esta propiedad; entonces es sorprendente y merece preguntas sobre la intuición detrás de ello. Pero por defecto, siempre supondría que cualquier propiedad que puedas pedir no es cumplida por un objeto dado.
0 votos
Una excelente pregunta. Esto me confundió mucho cuando estaba aprendiendo OpenGL por primera vez.
59 votos
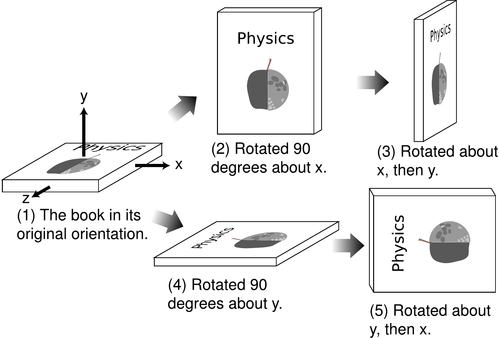
Encuentra una cama. Ponte de pie en el pie de la cama. Caíste hacia adelante sobre la cama y luego gira 90 grados hacia la izquierda. Ahora ponte de pie en el pie de la cama nuevamente. Gira 90 grados hacia la izquierda y cae hacia adelante en el suelo. Realizaste las mismas dos rotaciones en dos órdenes diferentes, ¿por qué no terminaste en el mismo lugar?
3 votos
@leftaroundabout totalmente. Las respuestas dadas hasta ahora incluyen muchas demostraciones interesantes de que las rotaciones no son conmutativas, pero eso no es lo que se ha preguntado. No estoy seguro de qué tipo de respuesta podría responder útilmente a la pregunta hecha aquí. "¿Por qué la multiplicación y la adición en los enteros no conmutan?" - bueno... porque no lo hacen.
2 votos
@AakashM La multiplicación y la adición conmutan en el sentido de que xy=yxxy=yx y x+y=y+xx+y=y+x. Pero creo saber a qué te refieres, si una operación es "multiplicar por mm", y otra es "sumar aa", tenemos que xm+a≠(x+a)mxm+a≠(x+a)m en general.
2 votos
@EricLippert Su descripción es bastante evocadora y va al corazón de la pregunta de por qué uno debería esperar conmutación en primer lugar. Sin embargo, tiene un pequeño defecto en el sentido de que asume que la "misma rotación" es la que se ve igual desde el objeto que se rota; creo que la convención habitual es que una rotación se identifica por un eje fijo en el espacio y un ángulo alrededor de él. Cuando era niño pensaba que la no conmutatividad está relacionada con la ambigüedad de lo que es la misma rotación (y en cierto sentido lo es), y que podría desaparecer con el punto de vista adecuado (pero no, no lo hará).
1 votos
... Con "en cierto sentido" me refiero a que la falta de conmutatividad está directamente relacionada con el conjugado de alguna transformación TT por otra transformación SS distinta de TT.
0 votos
@AakashM: Estoy totalmente de acuerdo con el comentario de leftaroundabout de que no deberíamos esperar ninguna propiedad a menos que haya una buena razón, y más bien deberíamos esperar que cualquier propiedad 'agradable' se deba a alguna razón subyacente. Sin embargo, para mí no es suficiente decir "no, simplemente es así", por eso en mi respuesta intento elucidar una estructura básica en el grupo de rotaciones 3D que es no conmutativa. De hecho, es literalmente el grupo no conmutativo mínimo, aunque no toda estructura no conmutativa tiene una incrustación de él.
0 votos
También, la respuesta de Dan Uznanski brinda otra perspectiva cuando restringimos nuestro enfoque a las transformaciones de matriz, para que podamos explicar la distinción entre 2 y 3 dimensiones.
0 votos
El verdadero origen del dicho ¡se levantó con el pie izquierdo! :)