Definitivamente tu profesor está incorrecto. De hecho, todo el punto $\vec{F}=m\vec{a}$ de escribirlo como una ecuación vectorial es enfatizar que la ecuación no depende del sistema de coordenadas que elijas para representar los vectores.
De hecho, vamos a desacreditar el contraejemplo de tu profesor verificando $\vec{F}=m\vec{a}$ en coordenadas cartesianas y polares. Supongamos que la partícula sigue la trayectoria descrita por tu profesor, sin pérdida de generalidad asumamos que la coordenada inicial $x$ es cero y la fuerza actuando sobre la partícula es cero en todo momento.
Sistema de Coordenadas Cartesianas
Primero escribamos la trayectoria en coordenadas cartesianas y verifiquemos que satisface la segunda ley de Newton.
El vector posición de la partícula es (Sin pérdida de generalidad, asumamos que la coordenada inicial $x$ es 0): \begin{align*} \vec{r} = vt \,\hat{x} + y_0 \hat{y} \end{align*} donde $y_0\neq 0$
Por lo tanto, al diferenciar directamente, se puede ver que $\vec{a} = \vec{0}$. Esto cumple con la segunda ley de Newton porque según $\vec{F} = m\vec{a}$, cuando $\vec{F}=0$, $\vec{a}=0$.
Sistema de Coordenadas Polares
¿Qué tal las coordenadas polares? Recordemos que en coordenadas polares, el vector unitario radial $\hat{r}$ siempre apunta a lo largo del vector de desplazamiento $\vec{r}$ y el vector unitario $\hat{\theta}$ se define como $\hat{r}$ rotado $90^o$ en sentido horario. ¿Entonces cómo se representa $\vec{r}$ en términos de las coordenadas polares? Muy simple, simplemente:
\begin{align*} \vec{r} = r \hat{r} \end{align*} donde $r=\sqrt{x^2 + y^2} = \sqrt{(vt)^2 + y_0^2}$
Entonces, ¿cuál es la velocidad de la partícula? \begin{align*} \vec{v} = \frac{d\vec{r}}{dt} = \frac{d}{dt} \left(r \hat{r}\right) = \frac{dr}{dt} \hat{r} + r\frac{d\hat{r}}{dt} \end{align*}
Aquí está la diferencia clave entre las coordenadas cartesianas y polares: En coordenadas cartesianas, el vector de base está fijo en el espacio, por lo tanto, el segundo término siempre es cero y simplemente necesitamos diferenciar la componente. Sin embargo, como puedes imaginar, en coordenadas polares, ¡el vector unitario $\hat{r}$ está cambiando de dirección a medida que se desplaza la partícula! Por lo tanto, tenemos términos adicionales en nuestras velocidades (en realidad, de manera similar para la aceleración).
Ahora, ¿cuál es la derivada temporal de $\hat{r}$ (y de manera similar $\hat{\theta}$ ya que tendremos ese término en la aceleración de todos modos)? La forma común de encontrarlo es primero convertir $\hat{r}$ y $\hat{\theta}$ en coordenadas cartesianas y tomar la derivada temporal. Sin embargo, dado que el razonamiento podría sonar circular al hacerlo, consideremos el problema geométricamente
Primero, ¿cuándo cambiarán y cómo cambiarán $\hat{r}$ y $\hat{\theta}$? Bueno, un poco de imaginación nos dice que dado que $\hat{r},\hat{\theta}$ son ambos vectores unitarios, la única forma en que pueden cambiar es cuando rotan. Además, dado que $\hat{r}$ apunta en la misma dirección que $\vec{r}$ y $\hat{\theta}$ está "bloqueado" en relación a $\hat{r}$, sabemos que ambos solo cambiarán cuando el vector de desplazamiento rota alrededor del origen por algún ángulo $d\theta$.
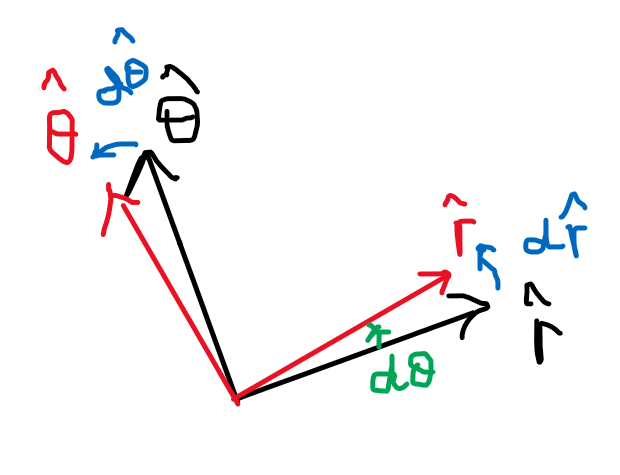
Luego, consideremos la siguiente figura:
![Vector unitario en coordenadas polares]()
Como puedes ver, cuando $d\theta$ es pequeño, $d\hat{r}$ está en la dirección de $\hat{\theta}$ y $d\hat{\theta}$ está en la dirección de $-d\hat{r}$. Además, si $d\theta$ está en radianes, la longitud de estos vectores es $d\theta \times 1$ (es decir, la longitud de arco barrida por $\hat{r}$ y $\hat{\theta}$). Por lo tanto, obtenemos la siguiente ecuación:
\begin{align*} d\hat{r} &= d\theta \hat{\theta}\\ d\hat{\theta} &= -d\theta \hat{r} \end{align*}
Por lo tanto, dividiendo ambos lados por $dt$, tenemos: \begin{align*} \dot{\hat{r}} &= \dot{\theta}\hat{\theta}\\ \dot{\hat{\theta}} &= -\dot{\theta}\hat{r} \end{align*}
Usando estas ecuaciones y simplemente diferenciando $\vec{r}$, tendremos:
\begin{align*} \vec{v} &= \dot{r} \hat{r} + r\dot{\theta} \hat{\theta}\\ \vec{a} &= (\ddot{r} - r\dot{\theta}^2)\hat{r} + (r\ddot{\theta} + 2\dot{r} \dot{\theta}) \hat{\theta} \end{align*}
Ahora, ¿cuál es $\theta(t)$ y $r(t)$ en el ejemplo de tu profesor? Bueno, por definición: \begin{align*} r(t) &= \sqrt{x^2 + y^2} = \sqrt{(vt)^2 + y_0^2}\\ \theta(t) &= \arctan(y/x) = \arctan(y_0/vt) \end{align*}
Entonces simplemente tenemos:
\begin{align*} \dot{r} &= \frac{v^2 t}{r}\\ \ddot{r} &= \frac{v^2}{r} -\frac{(v^2 t)^2}{r^3}\\ \dot{\theta} &= -\frac{vy_0}{r^2}\\ \ddot{\theta} &= \frac{2 t v^3 y_0}{r^4} \end{align*}
Sustituyendo todo de nuevo en la fórmula de aceleración que derivamos: \begin{align*} \vec{a} = \left[\frac{v^2}{r} -\frac{(v^2 t)^2}{r^3} - r \left(-\frac{vy_0}{r^2}\right)^2\right] \hat{r} + \left[r\left(\frac{2 t v^3 y_0}{r^4}\right) +2\left(\frac{v^2 t}{r}\right)\left(-\frac{vy_0}{r^2}\right)\right] \hat{\theta} \end{align*}
Después de un poco de álgebra (puedes dejar que WolframAlpha haga el trabajo pesado) ambas componentes son $0$. Así que la aceleración medida en coordenadas polares es realmente 0, lo que concuerda con la ley de movimiento de Newton.