Los siguientes son los cambios requeridos para la solución de Will Jagy para responder la pregunta (declaración original del problema). $$ \begin{pmatrix} \dot{x} \\ \dot{y} \end{pmatrix} = \frac{v}{2 s} \begin{bmatrix} -3 & -\sqrt{3} \\ \sqrt{3} & -3 \end{bmatrix} \begin{pmatrix} x \\ y \end{pmatrix} = \frac{v}{2 \sqrt{3}\sqrt{x^2+y^{2}}} \begin{bmatrix} -3 & -\sqrt{3} \\ \sqrt{3} & -3 \end{bmatrix} \begin{pmatrix} x \\ y \end{pmatrix}. $$ Aquí $s = \sqrt{3}\sqrt{x^{2} + y^{2}}$ es la longitud del borde del triángulo equilátero en el tiempo $t$. Tenga en cuenta que el vector de velocidad tiene una magnitud $v.
Ahora, los vértices del triángulo se acercan entre sí con velocidad $v - v\cos(120^{\circ})$. Entonces, la longitud del borde en el tiempo $t$ está dada por $$ s = l - \int^{t}_{0} \frac{3}{2}v(\tau) \;\text{d}\tau. $$ donde $l$ es la longitud del borde inicial del triángulo equilátero. Si la velocidad $v$ permanece constante, entonces $s = l - (3/2)vt$.
Si $(x_{0}, y_{0})$ es la posición inicial de $(x, y)$, entonces la solución al sistema de ecuaciones es $$ \begin{pmatrix} x \\ y \end{pmatrix} = \exp\left(A \int_{0}^{t} \frac{v}{s} \;\text{d}\tau\right) \begin{pmatrix} x_{0} \\ y_{0} \end{pmatrix}, \quad A := \frac{1}{2} \begin{bmatrix} -3 & -\sqrt{3} \\ \sqrt{3} & -3 \end{bmatrix}. $$
Observe que la forma de la curva trazada por $(x,y)$ en el plano 2D es la misma independientemente de la integral de tiempo dentro del exponencial. Esta integral es un parámetro que solo afecta dónde en la curva fija estará el punto en el tiempo $t$. Esto confirma la afirmación de Steven Stadnicki: "Creo que esto no cambia la curva de solución, pero definitivamente cambia su parametrización...".
Al establecer $s = 0$ obtenemos el momento en que los puntos se encuentran. En otras palabras, tenemos que resolver para $t$ en la ecuación $$ \int^{t}_{0} \frac{3}{2}v(\tau) \;\text{d}\tau = l. $$ Si la velocidad $v$ es constante, entonces el triángulo equilátero colapsará en $2l/3v$ segundos. Esta es la pregunta planteada en el libro de I.E. Irodov ("Problemas en Física General", problema 1.12, página 13, editores MIR, Moscú) como señaló Deepak. Siguiendo esta línea, tenemos \begin{gather} s(t) = l - \frac{3}{2}vt,\quad t_{\text{c}} := \frac{2l}{3v},\quad A \int^{t}_{0} \frac{v}{s} \;\text{d}\tau = -\frac{1}{3}\log\left(1-\frac{t}{t_{\text{c}}}\right) \begin{bmatrix} -3 & -\sqrt{3} \\ \sqrt{3} & -3 \end{bmatrix}, \\ \theta(t) := \frac{\log(1-t)}{\sqrt{3}},\quad P(t) := (1-t) \begin{bmatrix} \cos \theta(t) & \sin \theta(t) \\ -\sin \theta(t) & \cos \theta(t) \end{bmatrix}, \\ \exp\left(A \int_{0}^{t} \frac{v}{s} \;\text{d}\tau\right) = P\left(\frac{t}{t_{\text{c}}}\right),\quad \begin{pmatrix} x \\ y \end{pmatrix} = P\left(\frac{t}{t_{\text{c}}}\right) \begin{pmatrix} x_{0} \\ y_{0} \end{pmatrix}. \end{gather}
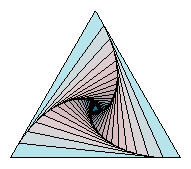
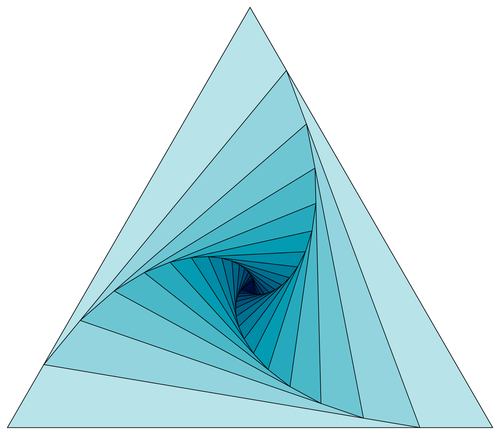
Dado que $\cos$ y $\sin$ son funciones acotadas, los elementos de $P(t/t_{\text{c}}) \to 0$ cuando $t \to t_{\text{c}}$. Entonces, los puntos chocarán en el origen (centroide) en el tiempo $t_{\text{c}}. Tenga en cuenta que $\theta(t/t_{\text{c}}) \to -\infty$ cuando $t \to t_{\text{c}}$, lo que significa que antes de que los puntos colisionen, habrán circulado infinitamente alrededor del origen.
En la ecuación de Will Jagy $v = \sqrt{3}\sqrt{x^2+y^{2}}. Los vértices trazan la misma curva pero nunca se encontrarán en un tiempo finito, ya que la velocidad tiende a cero cuando los vértices están cerca de la colisión.
Por cierto, este problema fue planteado por primera vez por Édouard Lucas (el problema de tres perros persiguiéndose). Pregunta 251, Nouvelle correspondance mathématique 3, 175--176, 1877. y la solución fue dada por Henri BROCARD y M. Laisant que se puede encontrar en la página 280 de la misma revista (todo esto está en francés).





13 votos
Bueno, por simetría, obviamente deberían encontrarse en el centro (por ejemplo, utilizar coordenadas triangulares/baricéntricas y argumentar que las tres coordenadas deben ser iguales).
2 votos
Martin Gardner tenía una columna en Scientific American en la que mostraba mariquitas en un cuadrado haciendo lo mismo. Hacía una imagen bonita.
1 votos
Muy apropiado... (Ver el cuaderno de Mathematica para una generalización a polígonos regulares...)
0 votos
@ShreevatsaR ¡Hola, puedes decirme cómo escribir esas coordenadas baricéntricas/triangulares? ¡Gracias!