
Al estudiar la dinámica topológica y ergódica, me he quedado bastante perplejo con las diferentes propiedades que puede tener un sistema (minimalidad, recurrencia regional, transitividad, mezcla, ergodicidad, ergodicidad única, etc.). Todas ellas tienen básicamente el sentido de la inestabilidad pero no siempre son equivalentes. ¿Alguno de vosotros tiene un resumen gráfico de esas propiedades, y en qué casos se implican unas a otras?
Respuestas
¿Demasiados anuncios?
Sean O
Puntos
820
Edición: He actualizado esta respuesta para reflejar los útiles comentarios de Andres Koropecki e Ian Morris.
Como mencionan las otras respuestas, la primera distinción crucial que debes hacer es que algunas propiedades se refieren a un topológico sistema dinámico $(X,T)$ mientras que otros se refieren a un preservación de la medida sistema dinámico $(X,T,\mu)$ . Por lo tanto, hay dos conjuntos diferentes de definiciones. Permítanme hacer un esbozo de algunas de las relaciones dentro de cada conjunto.
Primero supongamos que tenemos un sistema dinámico topológico $(X,T)$ . Entonces, cuatro de las propiedades clave son la transitividad topológica, la mezcla topológica, la minimidad y la ergodicidad única. Las tres primeras están relacionadas por
- mezcla topológica $\Rightarrow$ topológicamente transitivo;
- mínimo $\Rightarrow$ topológicamente transitivo.
La ergodicidad única es independiente de esas tres propiedades. La imagen es la siguiente.
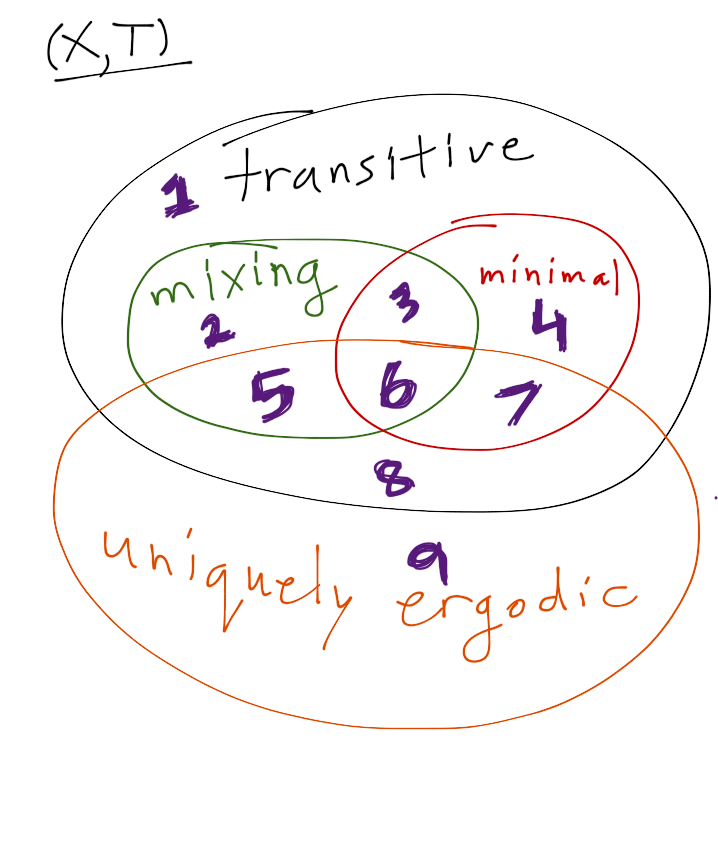
Contraejemplos 1-9 que ilustran las contenciones estrictas son las siguientes. (Puede que estos no sean los contraejemplos más sencillos o más tempranos en cada caso, y agradezco correcciones o mejoras. Esto se basa en una rápida búsqueda en Google de cosas que no están en mi memoria, además de las útiles adiciones ofrecidas por los comentaristas).
1. $X = \Sigma_2 \times \{a,b\}$ , el producto directo de un desplazamiento completo de dos con una órbita de período dos, donde la dinámica es $\sigma\times S$ con $\sigma$ el mapa de turnos y $S$ el mapa intercambiando $a$ y $b$ .
2. $X=\Sigma_2$ .
3. Construido por Bassam Fayad, Transformación analítica topológicamente mixta y mínima pero no ergódica sobre $\mathbb{T}^5$ , 2000.
4. Construido por Furstenberg, Ergodicidad estricta y transformación del toro , 1961.
5. Un flujo irracional en el toro, ralentizado cerca de un único punto: véase el comentario de Andres Koropecki.
6. Como señala Ian Morris en los comentarios, el mapa de identidad en un conjunto único funciona aquí. Un ejemplo menos trivial fue dado por Karl Petersen, Un conjunto mínimo simbólico topológicamente muy mezclado , 1970.
7. Rotación del círculo por un ángulo irracional.
8. Producto directo del ejemplo de 5 con una órbita periódica. (De nuevo, como sugiere Andrés en los comentarios).
9. Mapa norte-sur: un mapa $T\colon [0,1]\to [0,1]$ con puntos fijos en $0,1$ y tal que $T(x) < x$ para todos $x\in (0,1)$ . Identificar los puntos finales $0$ y $1$ por lo que se trata de un mapa circular únicamente ergódico.
Probablemente merezca la pena señalar un par de cosas.
- La terminología no siempre es uniforme. Por ejemplo, uno de los artículos a los que he hecho referencia (creo que el de Petersen) utiliza "ergódico" en lugar de "topológicamente transitivo", para destacar la analogía con el caso de preservación de la medida. Así que la gente puede utilizar a veces palabras diferentes para la misma cosa.
- A la inversa, la misma palabra puede significar cosas diferentes. Hay dos definiciones de transitividad topológica, una que implica a los conjuntos abiertos ( $f^n(U) \cap V \neq \emptyset$ para algunos grandes $n$ ) y la otra que implica la existencia de una órbita densa. La definición que implica a los conjuntos abiertos refleja más estrechamente la definición de mezcla topológica (intersección no vacía para cada grande $n$ ), mientras que la definición con una órbita densa refleja más estrechamente la minimidad (densidad de cada órbita). Las definiciones son equivalentes si $X$ es separable, de segunda categoría, y no tiene puntos aislados.
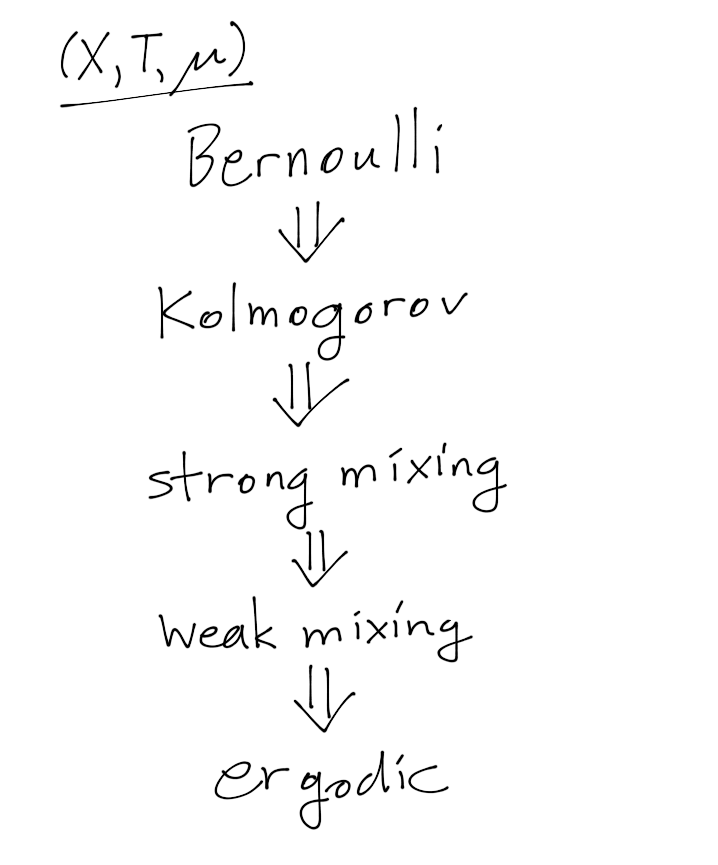
Todo lo anterior es para sistemas dinámicos topológicos, donde no se especifica ninguna medida invariante. Luego están las propiedades ergódicas: las que dependen de que un sistema conserve una medida $\mu$ . Para estos se tiene la jerarquía ergódica.
Es muy frecuente que se quiera estudiar un sistema dinámico topológico como un sistema que preserva la medida, dotándolo de una medida invariante, y en este caso es bastante razonable preguntarse por las relaciones entre las dos clases diferentes de propiedades. Pero esto depende de la medida invariante que se elija, porque en general puede haber muchos de ellos . Cabe preguntarse qué propiedades de $(X,T)$ le permiten elegir medidas invariantes $\mu$ con ciertas propiedades agradables, y esto es una historia completamente diferente que ampliaría esta respuesta mucho más allá de los límites de la propiedad.
Chris
Puntos
165
Lógicamente son dos temas diferentes.
-
La teoría ergódica trata de las transformaciones de un espacio dotado de una medida (y la transformación preserva esta medida). La medida está dada de antemano. Las 3 últimas nociones que mencionas están relacionadas con esta situación, y expresan varios grados de "mezcla".
-
La dinámica topológica trata de las transformaciones continuas de un espacio topológico. Las 3 primeras nociones que mencionas están relacionadas con la "mezcla" en sentido topológico. En general, no hay ninguna medida dada de antemano.
En muchas situaciones interesantes están presentes AMBAS estructuras: la topología y la medida. En realidad, ambas teorías tienen su origen en la mecánica clásica, donde tenemos una transformación suave transformación suave de una variedad, que también preserva una medida en esta variedad.
En general, si se tiene una transformación continua de un espacio topológico, no se da ninguna medida dada. Y viceversa, cuando se tiene una transformación de un espacio de medida, este espacio puede no estar dotado de ninguna topología. (Como en la probabilidad).
En la dinámica topológica, cuando la medida no está dada a priori, pero la transformación es caótica en el sentido topológico, es posible INTRODUCIR una medida invariante relacionada con su transformación, y llevar los métodos de la teoría ergódica al estudio de la dinámica suave. Las medidas invariantes existen para las transformaciones continuas de un espacio compacto espacio compacto, pero son muy numerosas. (Esto se llama el teorema de Bogoliubov-Krylov).
Una forma famosa de introducir una medida invariante "agradable", intrínsecamente relacionada a una transformación suave se llama la medida SRB (Sinai-Ruelle-Bowen)
Sobre todo esto, recomiendo los libros de Sinaí. Explican la teoría ergódica en sí, pero también sus aplicaciones a la dinámica suave.
Jim
Puntos
505
En general, las propiedades ergódicas y topológicas no están relacionadas, aparte de las implicaciones obvias. Por poner un ejemplo extremo, hay acciones sobre conjuntos compactos que son mínimas, pero a pesar de ello son completamente disipativas (es decir, están lo más lejos posible de la ergodicidad) con respecto a medidas cuasi-invariantes no atómicas. La razón es que, a grandes rasgos, las propiedades topológicas describen lo que ocurre con los conjuntos abiertos y cerrados, sin decir nada sobre los conjuntos medibles generales.
Sin embargo, hay sistemas para los que las propiedades topológicas y ergódicas están mucho más relacionadas. El ejemplo clásico lo proporcionan los flujos geodésicos (geodésicos y horóticos) sobre superficies de curvatura negativa constante.


1 votos
Recomiendo la lectura del artículo de Weiss y Glasner - "SOBRE LA INTERPOSICIÓN ENTRE LA DINÁMICA MEDIBLE Y LA TOPOLÓGICA".