Aquí es una idea. Considere la siguiente parametrización, que se supone que cubre el espacio de configuración en cuestión.
C7:={(xkyxzk),(akbkck)1≤k≤7∈R3×27|such that conditions 1.-4. are satisfied}
Condiciones:
- x2k+y2k+z2k=1
- ⟨(xkykzk),(akbkck)⟩=0
- a2k+b2k+c2k=1
- d(li,lj)≥2 para 1≤i<j≤7, donde se define la línea de
lk:={2(xkykzk)+α(akbkck)|α∈R} and denote with d(⋅,⋅) la distancia entre dos líneas.
Tenga en cuenta que la condición 4. puede ser reescrito como polinomio desigualdades. Por lo tanto C7 es un semi-algebraicas conjunto en R42.
El (x,z,y) son los puntos, en donde la unidad de cilindro es tangente a la unidad de la esfera. El correspondiente (a,b,c) da la dirección en el espacio de la tangente y de las líneas de l son los núcleos de los cilindros. (Tenga en cuenta que (−a,−b,−c) da el mismo cilindro.)
A la pregunta "Es C7 vacío?" debe ser decidable. Tal vez una aproximación algorítmica podría ayudar desde aquí.
Para las otras preguntas que el estudio de un análogos definidas C6, lo cual sabemos no puede ser vacío podría ser vale la pena.
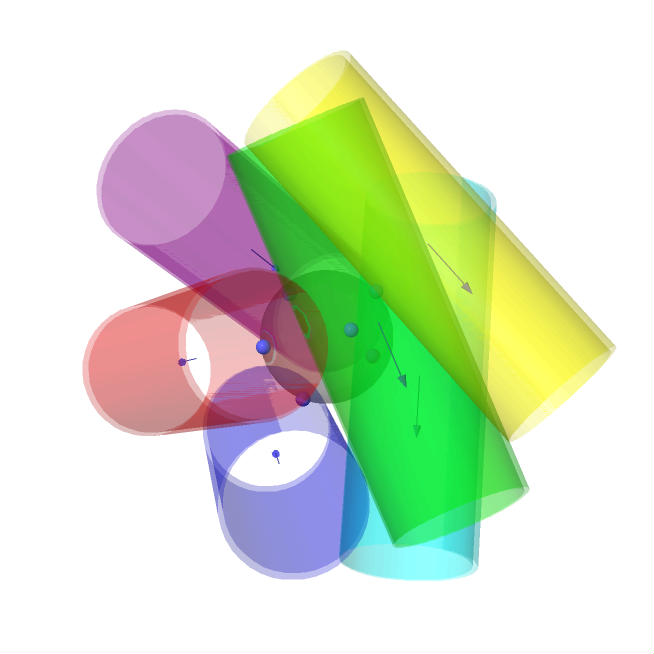
Yo escribí un pequeño programa que intenta encontrar puntos de la semi-algebraica de conjuntos. Esto es lo que encontrado por C6 (haga clic aquí para ver una animación).
![6 kissing cylinders]()
Vamos a tomar un punto de vista ligeramente diferente. Fijar el radio de la bola de a se 1, pero vamos a los radios de las k cilindros variar mientras se asegura de que todos los cilindros tienen el mismo radio. Entonces podemos preguntar: ¿Cuál es el mayor radio de rk, por lo que nos podemos encontrar en k no se solapan los cilindros de radio rk, que
toque la unidad de la bola? Por lo tanto la pregunta es: r7≥1?
Un evidente límite inferior en rk proviene del embalaje que permite que una sección ecuatorial que es un círculo de embalaje, como por k=6 en la figura 1 y la figura 2 en la pregunta del post. Por tanto, tenemos:
rk≥sin(πk)1−sin(πk)
Aquí está una lista de aproximaciones decimales para las pequeñas ks:
k345678sin(πk)1−sin(πk)6.4641012.4142131.42591910.7664210.619914
Tal vez sorprendente resultado de mis cálculos es el hecho de que r6>1, de hecho
r6>1.04965
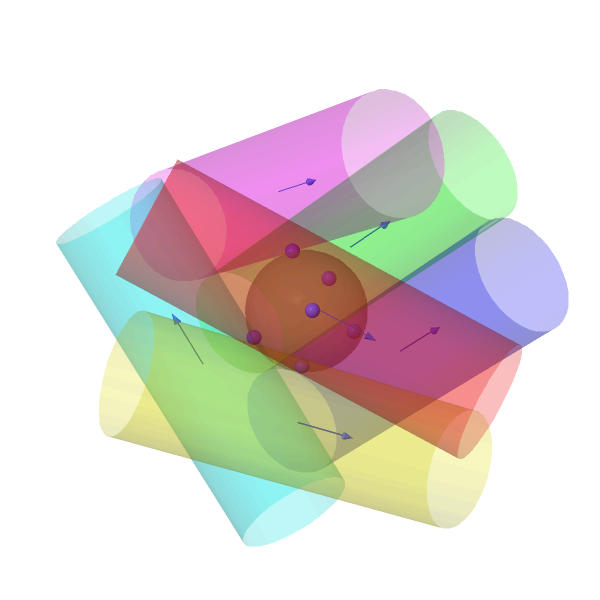
Así que en otras palabras es la configuración de 6 cilindros donde los cilindros de radio mayor que 1.04965. Aquí está una foto de la configuración
(de nuevo, haga clic aquí para ver una animación):
![6 kissing cylinders]()
También me atrajo cilindros de radio 1 con la misma tangente puntos, por lo que se puede ver la diferencia.
El espacio de configuración puede ser visto como subconjunto de la 6la potencia de la unidad de la tangente paquete de la esfera (T1(S2))6 (ver condiciones 1.-4. y Henrik Rüping del comentario).
El resultado de la búsqueda de una configuración con un amplio radio es: el espacio de configuración contiene un subconjunto abierto de (T1(S2))6 y por lo tanto es 18-dimensiones localmente.
Editar:
Aquí está la lista de los límites inferiores en rk para las pequeñas k:
- Para k=3 e k=4 I conjetura de la trivial obligado para rk dado anteriormente a ser fuerte.
- Para k=5 uno puede encontrar una configuración que se muestra:
r5>1.45289>1.425919
- Para k=6 tenemos r6>1.04965>1 como se mencionó anteriormente.
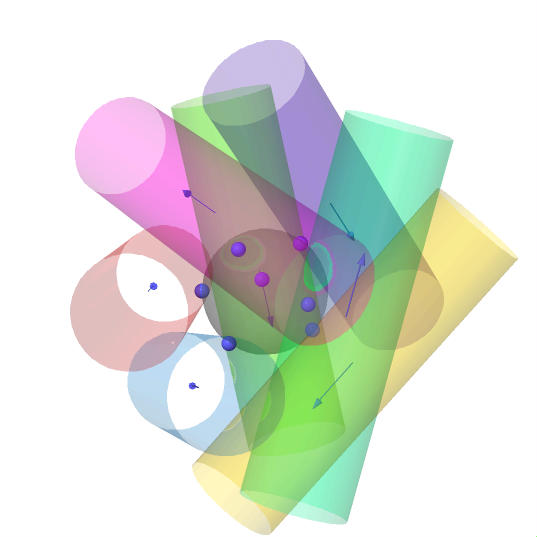
- Para k=7 he encontrado una configuración que muestra r7>0.846934>0.766421. Aquí está una foto de esta configuración (de nuevo, haga clic aquí para ver una animación):
![7 kissing cylinders]()